Physics of Fitness – Sled Push
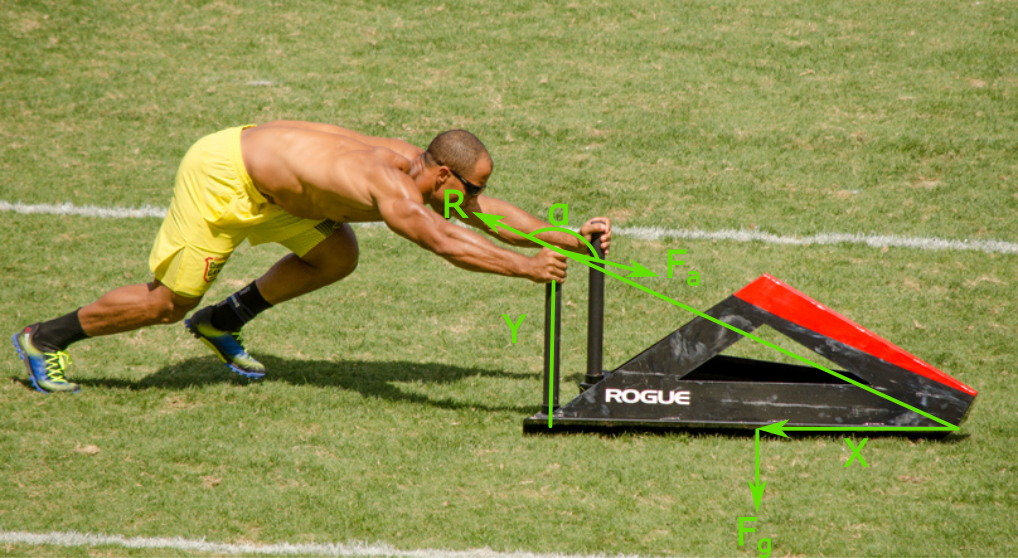
Physics of the sled push. Here we see Neal Maddox at the 2014 CrossFit Games pushing a sled with short handles.
The sled push has appeared at the CrossFit Games in 2011, 2012, 2014, 2019, and 2020. Only in 2011 was the sled heavy. Every other event was a relatively light sled push. And there is something common with the fastest times with the sled push: they are mostly upright, not bent over like the heavy sled push. Yet, year after year, the world’s fittest athletes attack the sled push–whether in training or in competition–bent over.
So, it’s time to answer the question using physics.
What is the best way to push the sled?
Tipping
Most athletes excitedly sprint to the sled and inevitably push with all their momentum, explosiveness, and adrenaline to only tip the sled. Step 1: do not tip the sled.
Tipping occurs when the athlete’s applied torque exceeds the gravitational torque. To prevent tipping we must have net torque equal to zero. \[\begin{aligned} \vec{\tau}_{net} &= \vec{\tau}_{applied} + \vec{\tau}_{gravity} \\[2em] &= \vec{R}_{hands} \times \vec{F}_{applied} + {\vec{R}}_{COM} \times \vec{F}_{gravity}\\[2em] |\vec{\tau}_{net}| &= R_{hands} \cdot F_{applied} \cdot \sin \left( \vec{R}_{hands}, \vec{F}_{applied} \right) - r_{COM} \cdot F_{gravity} \cdot \sin \left(\vec{r}_{COM}, \vec{F}_{gravity} \right)\\[2em] &= \sqrt{L^2+Y^2} \cdot F_{applied} \cdot \sin \left( \vec{R}_{hands}, \vec{F}_{applied} \right) - X \cdot M \cdot g\\[2em] \end{aligned}\]
We should take this one step further. We can substitute for the force as a change in momentum. \[\begin{aligned} |\vec{\tau}_{net}| &= \sqrt{L^2+Y^2} \cdot F_{applied} \cdot \sin \left( \vec{r}_{hands}, \vec{F}_{applied} \right) - X \cdot M \cdot g\\[2em] &= \sqrt{L^2+Y^2} \cdot \dot{p}_{applied} \cdot \sin \left( \vec{r}_{hands}, \dot{\vec{p}}_{applied} \right) - X \cdot M \cdot g\\[2em] &= \sqrt{L^2+Y^2} \cdot \dot{p}_{applied} \cdot \sin \left( \alpha \right) - X \cdot M \cdot g\\[2em] \end{aligned}\]
Note \(Y\) is the vertical distance of the hands, \(L\) is the length of the sled, and \(X\) is the horizontal distance of the center-of-mass (COM).
Figure 1: free body diagram
The simplest solution here is to direct your force towards the pivot point. \[|\vec{\tau}_{net}| = - X \cdot M \cdot g\\[2em]\]
This was incidently the case with the 2014 CrossFit Games. The sleds that year had handles which were much shorter than standard sleds (see the main image for this post).
 Figure 2: 2014 CrossFit Games Sprint Sled
Figure 2: 2014 CrossFit Games Sprint Sled
Unfortunately this means increased friction and less help from gravity.
Slipping
What slows athletes is the frictional force. Thus, step 2: reduce friction.
This was the center of major controversy after the 2019 CrossFit Games. Athletes and fans believed the lanes were unfair, such as Mat Fraser in the Buttery Bro’s documentary. Even Reddit had their own armchair physicists. But: Fraser and roughly half of the field in his heat clearly grip the handles at the top and tip their sleds.
 Figure 3: 2019 CrossFit Games Sprint Couplet. About half of the field clearly tips their sled from the start of the race. Maybe do it again on the way back. Watch for yourself (Heat 2 starts at 12:50).
Figure 3: 2019 CrossFit Games Sprint Couplet. About half of the field clearly tips their sled from the start of the race. Maybe do it again on the way back. Watch for yourself (Heat 2 starts at 12:50).
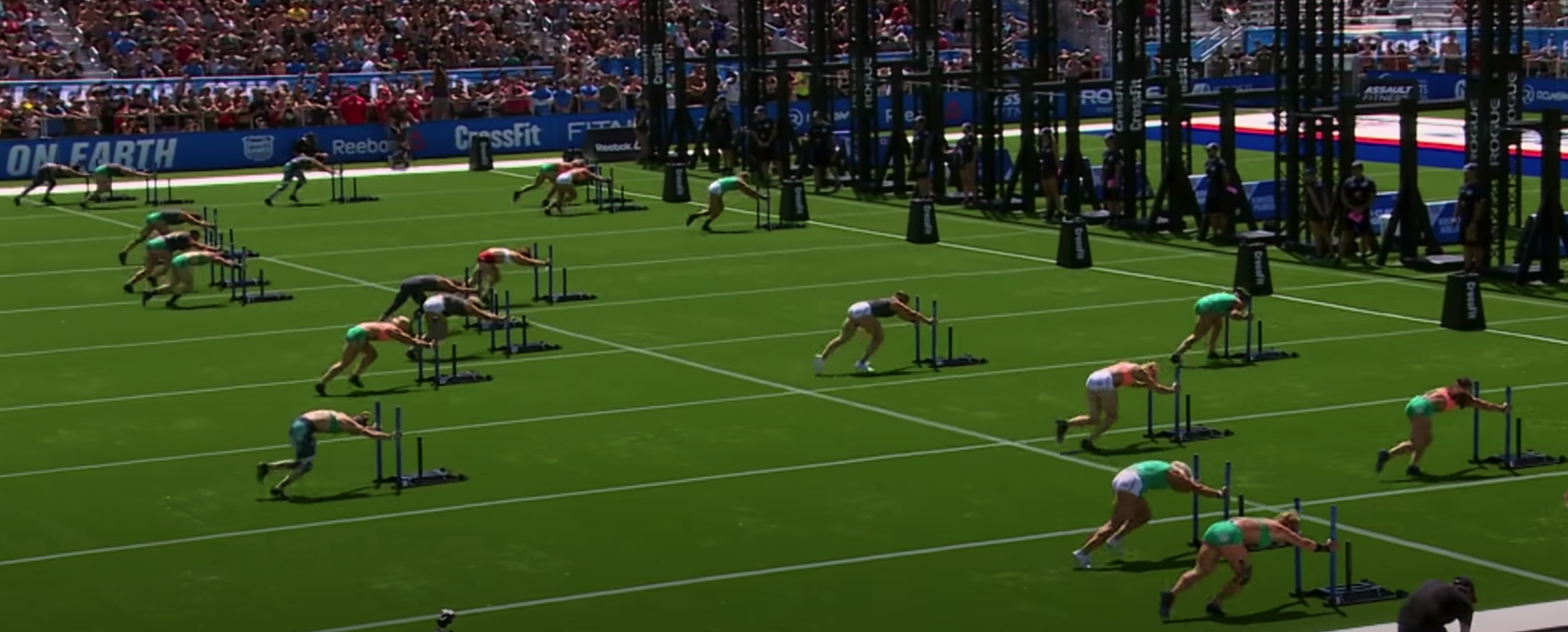 Figure 4: 2019 CrossFit Games Sprint Couplet. The women mostly do not tip their sleds, which is understandable. The women do, however, lean heavily into their sleds. Heat 2 starts at 12:30.
Figure 4: 2019 CrossFit Games Sprint Couplet. The women mostly do not tip their sleds, which is understandable. The women do, however, lean heavily into their sleds. Heat 2 starts at 12:30.
One possible justification is that their lanes as unfair friction. Maybe the sun slightly melted the plastic which increased the coefficient of friction and made it “quicksand”, as one redditor said.
For slipping the athletes must be able to overcome the frictional force, which is dicated by the interaction between the bottom of the sled and the turf. \[\begin{aligned} \vec{F}_{net}^{(x)} &= \vec{F}_{applied}^{(x)} + \vec{f} \\[2em] &= \vec{F}_{applied}^{(x)} - \mu Mg \\[2em] \rightarrow F_{applied} \cdot \cos \theta &> \mu (mg - F_{applied} \cdot \sin \theta)\\[2em] \end{aligned}\]
We can minimize the friction with a clever choice of our direction of force, the angle in the equation, which we find by differentiating. \[\begin{aligned} \frac{d}{d\theta} \left ( |\vec{F}_{net}^{(x)}| \right) &= 0 = - F_{applied} \cdot \sin \theta + \mu mg F \cos \theta)\\[2em] \theta &= \tan^{-1} \left (\mu \right )\\[2em] \end{aligned}\]
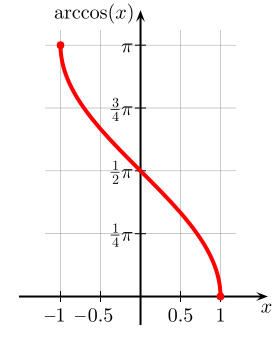 Figure 4: Frictional Force as a function of applied for angle
Figure 4: Frictional Force as a function of applied for angle
One of the largest examples of static friction is aluminum on aluminum. The maximum coefficient might be around 1.35 or so. In fact, the coefficient for rubber on grass is only 0.35 and the sleds likely had plastic–meaning the coefficient was much less than 0.3. Nevertheless, we can estimate an appearent weight difference. In other words, let us assume there is a different in friction across the lanes. What would it feel like for the athletes? Would it feel like quicksand?
Assume the best case scenario had coefficient of 0.3 and worst case scenario had a coefficient of 1.35. The apparent weight would be around 450 pounds instead of 95 pounds. That’s a big difference. However, this is an extreme case and only a means for us to define bounds for the truth to reside within. And: we can see from the video that no athlete moved as if the apparent weight was even over 200 pounds.
According to a study from New Zealand their best case coefficient for rubber on wet clovers is 0.59 and their worst case on dry agridark is 0.80. Therefore, if we used these coefficients, we find the apparent mass to be: \[M_{apparent}/m_{actual} = \frac{\mu_{worst}}{\mu_{best}} = \frac{0.8}{0.59} \approx 1.36\]
A 95 pound sled would feel like 130 pounds. Not insignificant. However, I believe the “controvery” is the technique.
Technique
The announcers during the 2014 CrossFit Games claimed that Maddox was essentially carrying the sled. As we found above there is an angle to reduce friction. This could have been the benefit. However, lifting the sled by the handles would only shift the friction towards the nose instead of balanced across the bottom. The total frictional force would remain the same. And our analysis above is only pertinent to lifting through the COM. Furthermore, lifting the sled tilts the nose down and into the ground, which certainly increases resistance.
A second option to prevent tipping is hand position. Return to our first set of equations and notice that the applied torque is proportional to the position of the hands, \(Y\). This is exactly the advice that the announcers insisted on. But lower hands also impede range of motion for the legs to drive and make it more difficult to breathe. Try sprinting while holding your ankles. Moreover, we have a case study from Neal Maddox during the 2014 CrossFit Game sled push events, ‘‘Sprint Sled 1’’ and ‘Sprint Sled 2’’. Maddox won both events and used a different technique for each sprint.
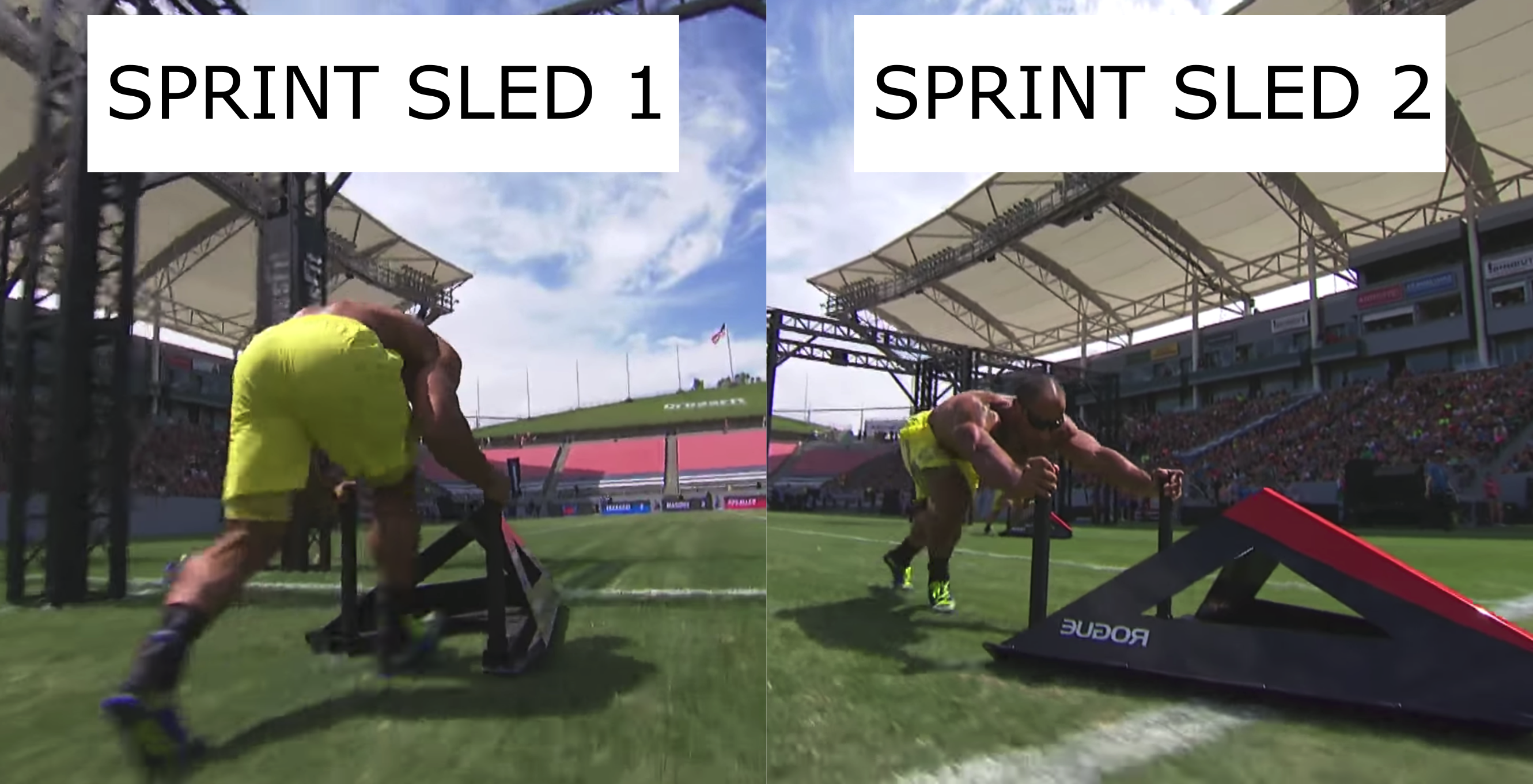 Figure 4: Neal Maddox during 2014 CrossFit Games Sprint Sled 1 & 2. (LEFT) Rounded back, hovering over the sled. Time: 0:30. (RIGHT) Leaning into sled. Time: 1:09.
Figure 4: Neal Maddox during 2014 CrossFit Games Sprint Sled 1 & 2. (LEFT) Rounded back, hovering over the sled. Time: 0:30. (RIGHT) Leaning into sled. Time: 1:09.
Maddox employed the rounded-back technique for the first sprint, with a final time of 0:30. For the second sprint he leaned into his sled, likely from low-back fatigue, and finished in more than twice the time (1:09).
In the first sprint event his hips and shoulders were stacked over his foot with each drive. In the second event his shoulders are far in front of his hips. To counter balance his forward COM he must send his hips behind his feet and lean into the sled to prevent the torque caused by gravity acting on his shoulders and head. Subsequently, leaning into the sled increases the frictional force. \[|\vec{F}_{net}^{(x)}| = F_{applied} \cdot \cos \theta - \mu (mg + F \sin \theta)\\[2em]\]
The better approach is the rounded-back technique from the first event. This technique has the shoulders, hips, and COM stacked over the foot. In fact, it is the Pose Running Method (PRM) applied to sled pushing.
Pose Pushing
The posture of the winning sled-push athletes mimics pose running. In PRM the shoulders, hips, and COM are stacked over the foot. The act of falling accelerates the body forward. The second leg swings forward to catch the body and repeat the process.
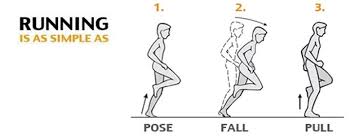 Figure 7: Pose running
Figure 7: Pose running
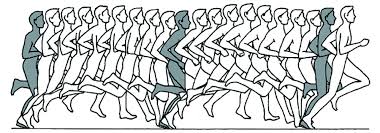 Figure 8: One cycle of pose running
Figure 8: One cycle of pose running
The body converts potential energy into kinetic energy. A standing runner has potential energy \(U = mgb\), where \(m\) is their mass, \(g\) is gravitational acceleration, and \(b\) is the radius of rotation for the COM. The runner exchanges energy from potential to kinetic energy by falling forward. This change is given by \[\Delta U = mg \delta h = mgb \left(1-\cos \theta_m \right).\]
Equating the changes in energies results in \[\begin{aligned} \Delta K &= \Delta U = mg \delta h = mhb \left(1-\cos \theta_m \right), \\[2em] mv \delta v &= mgb \left(1-\cos \theta_m \right). \\[2em] \end{aligned}\]
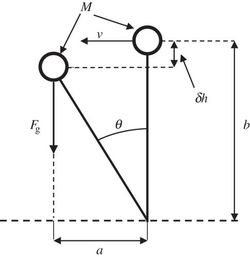 Figure 9: Through this rotational motion runners can increase their horizontal velocity by \(\delta v = \left( \frac{gb}{v} \right) \left(1-\cos \theta_m \right)\)
Figure 9: Through this rotational motion runners can increase their horizontal velocity by \(\delta v = \left( \frac{gb}{v} \right) \left(1-\cos \theta_m \right)\)
And the change in horizontal velocity is, therefore, given by the relation \[\delta v = \left( \frac{gb}{v} \right) \left(1-\cos \theta_m \right).\]
In conclusion, by mimicking the Pose Running Method athletes can maximize horizontal acceleration.
Additional Resources
[1] Gravity-driven horizontal locomotion: theory and experiment
[2] Runners do not push off the ground but fall forwards via a gravitational torque